智能控制系统的灵魂:深入研究 PID 控制器的算法逻辑
By Long Luo
PID 算法 s是自动控制领域中很重要的算法。
\[ u(t) = K_Pe(t) + K_I \int e(t) \mathrm{d}t + K_D \frac{\mathrm{d}e(t)}{\mathrm{d}t} \]
Simple PID Controller
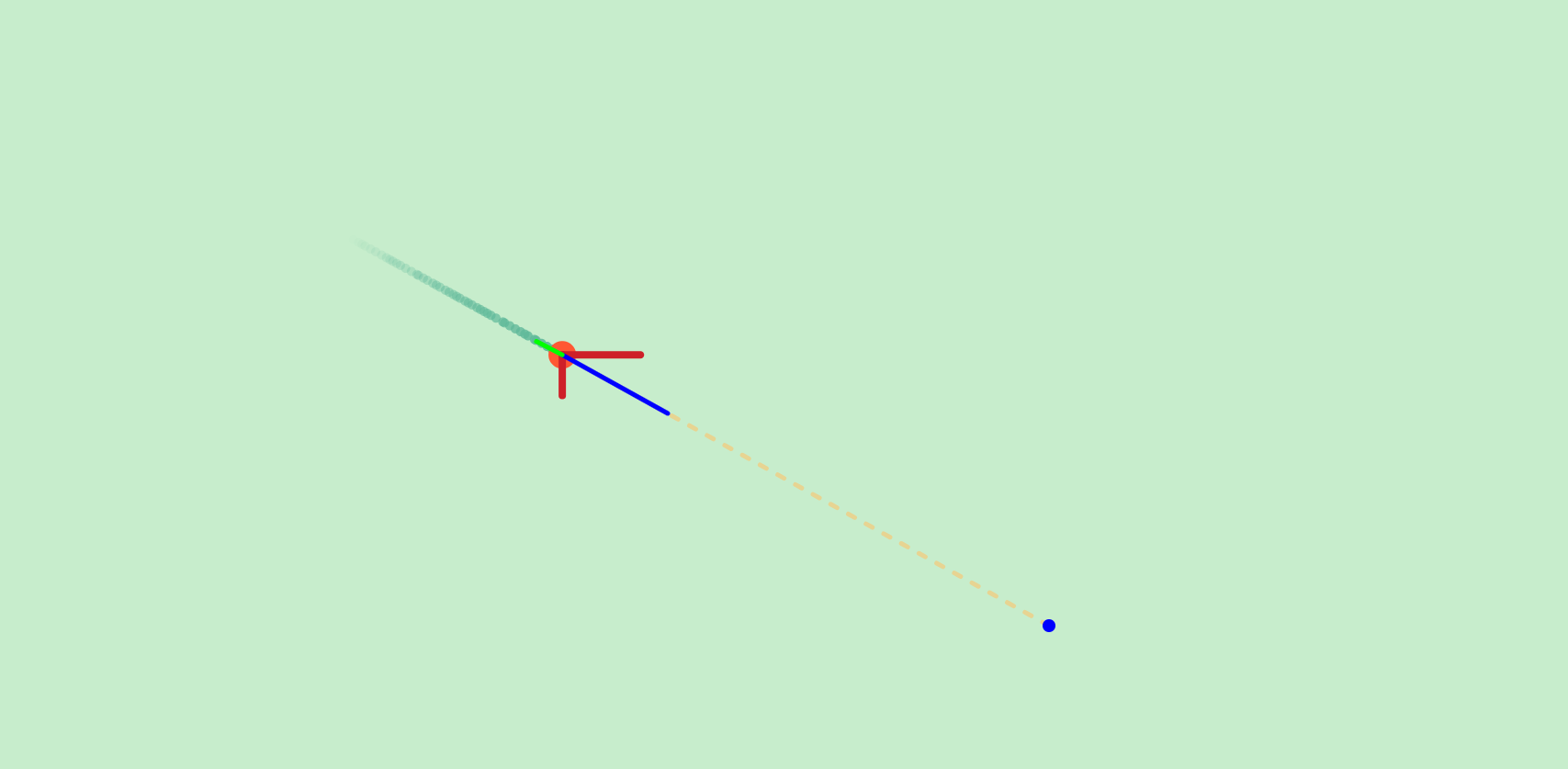
非常简单的 PID 算法在线互动式模拟器,传送门 → :
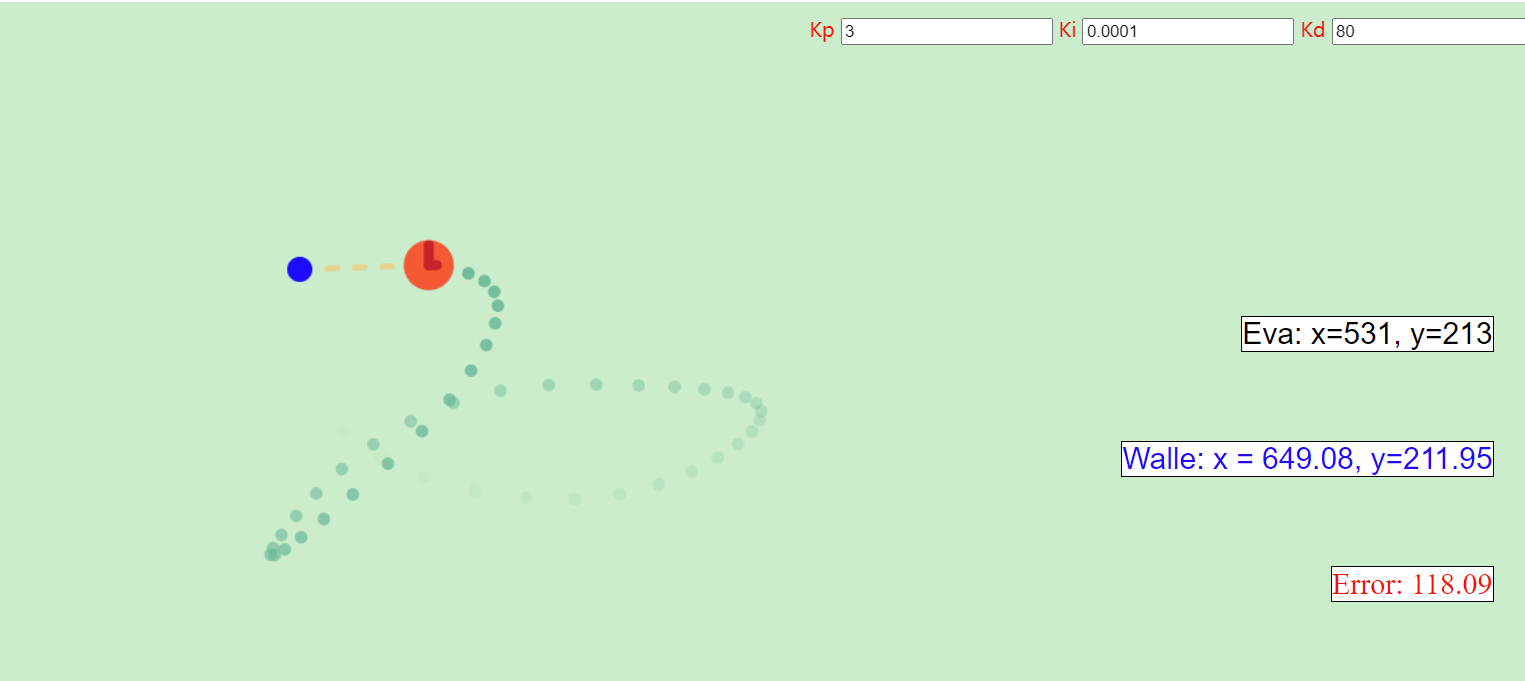
之前这个是 PID v1.0 版本,最近重构了代码,增加了一些新功能:
- 增加机器人速度 \(v\) 及加速度 \(a\) 显示;
- 增加 2 个图表展示 PID X 轴方向及 Y 轴方向的 P、I、D \(3\) 个分量随时间变化显示;
- 之前代码将时间及速度固定了,但这不符合实际,增加随 \(dt\) 变化积分和微分项;
ToDos:
- 增加阻力因素,以更接近实际;
- 增加自动调谐P,I,D 3个参数的功能,目前开发中。

PID 平衡小车
PID 平衡小车 在线网络版,传送门 → :

参考文献
1 PID Controller 2. OpenCV